



DIY RC Drona Quadrocopter X4M380L Cadru Kit APM 2.8 Zbor GPS Control Motor fără Perii Quadcopter F14893-K
Produs nou
1 Produse
In stoc
Informatii
RM1641845738474246
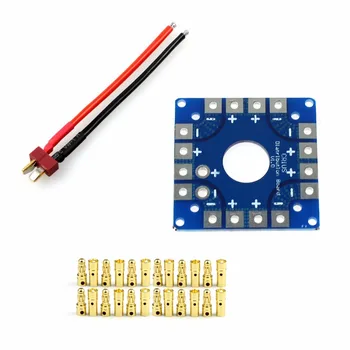
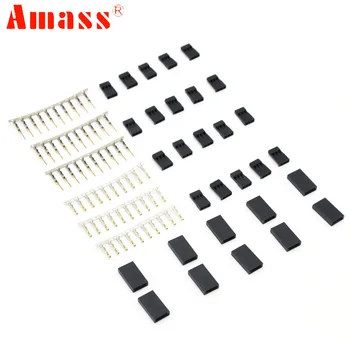
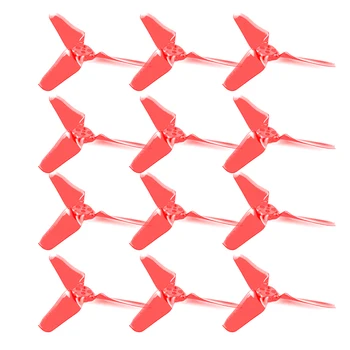
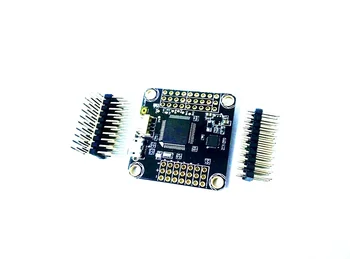
Pachetul include: X4M380L fibra de sticla Cadru *1 în sensul acelor de Ceasornic Motor fără Perii *2 Contra-sensul acelor de ceasornic Motor fără Perii *2 30A Brushless ESC Controler de Viteză *4 9443 Elice *2 KK Conexiune Bord *1 APM2.8 de Control al Zborului *1 6M GPS cu Busola *1 3.5 mm Conector Bullet *12 20cm Cârlig și Buclă Bandă de Fixare *1 T Plug Conector de sex Masculin Silicon Sârmă *1 5pcs 10cm Servo Receptor Extensie a conductorului de Cablu*1 GPS Pliere Antena Mount Titularului*1
Notificare:
Înainte de a putea configura APM, va trebui să conectați mai întâi de toate împreună.Acest ghid vă va arăta toate cablurile și piesele de care ai avea nevoie pentru a se conecta la APM.
Tipic Quadcopter Layout
Vă rugăm să rețineți ilustrația de mai Jos evidențiază o (TIPIC) de instalare.Acesta conține echipamente opționale, inclusiv o Camera Gimbal și o Baterie Monitor si se utilizeaza un ESC prin cablu "Y" conexiune de putere, mai degrabă decât puterea de placa de distribuție comune pentru mai multe MultiCopters.
1. Conectarea motoarelor și RC viteze
Privire de ansamblu asupra conexiunilor pe Ardupilot Mega v2 bord
Notă: instrucțiunile de mai jos sunt pentru regulat RC receptoare cu PWM de ieșire (un singur cablu pe fiecare canal).Dacă utilizați un "PPM" receptor (un singur cablu poartă toate canalele), urmați instrucțiunile .
Înainte de a putea configura Arducopter, va trebui să conectați mai întâi de toate împreună.Acest lucru este destul de ușor.Aveți nevoie pentru a conecta RC receptor pentru partea de Intrare de bord.Puteți folosi cabluri incluse cu Arducopter Kit, sau dacă utilizați un alt cadru, puteți utiliza cabluri, sau femeie la femeie servo cabluri
Conexiuni între RC receptor și Ardupilot Mega v2 bord
Dacă utilizați femeie la femeie servo cabluri, sol (negru) fiecare parte a conectorului trebuie să fie în afara de bord, semnalul (alb/portocaliu) trebuie să fie în interior așa cum se arată mai jos.
Conectarea cu conectori drept
Conectarea cu unghi drept conectori
Dacă utilizați un multi-pin conector care a fost inclus cu Arducopter Kit-ul, conectați-le așa cum se arată mai jos
Partea de intrare pentru receptor RC
Partea de ieșire a PDB
Vă rugăm să rețineți, că ESC, conectori ar trebui să fie conectat la partea de ieșire, este recomandat să utilizați numai puterea de la unul din ESC-i.Acest lucru poate fi dune de tăiere firul roșu pe toate, dar unul dintre ESC, sau prin folosirea unui adaptor special. 2. Conectarea ArduCopter motoare
Încă o dată, dacă utilizați un Arducopter Kit, cu PPB, atunci tu dont trebuie să vă faceți griji despre acest lucru, dacă sudat totul corect ca motoarele sunt atribuite corect pini cu cabluri de curent conectat în pasul anterior.Cu toate acestea, va neet să asigurați-vă că motoarele se rotesc în direcția corectă.Imaginile de mai jos prezintă posibile arducopter configurații cu motor corect orientarea
Sfat rapid: Dacă motorul nu se învârte în direcția corectă, pur și simplu a comuta poziția de vreo două ESC-motor de fire.
Arducopter Quad
Arducopter Tri
Arducopter Hexa, Octo, și Y6
Arducopter OCTA QUAD (X8)
Conectarea unui Roll-Tilt Camera mount
3. Conectarea Senzorilor Opționali
Sonar - Telemetru Cu Ultrasunete
AC2 sprijină MaxSonar linie de sonare pentru nivel scăzut altitudine ține și în viitor de evitare a coliziunii.Sub 10 metri sonar este utilizat în principal pentru a altitudinii.Mai sus de 10 metri, senzor barometric este folosit.GPS-ul nu este necesar pentru a altitudinii.
Conectați-vă Senzor Ultrasonic la A0 port de Ardupilot Mega v2 bord
Sonar senzorii sunt destul de sensibile la zgomot, adăugând ceva ca un ferită sufoca de cablu ar putea ajuta.Cel mai important este de a monta sonarul departe de alte electronice, cum ar fi ESC, sau wireless module de telemetrie.
Posibile Cauze ale sonar Interferenta
Electrice zgomotul cauzat de către Ces, Servo, de comutare sau de BEC e pe același circuit ca și Sonar
CEM radiatii de la motoare electrice, fire de motor, ESC sau Xbee.
Zgomot acustic de la elice
Vibrații de motoare, elemente de recuzită, etc.
Fluxul Optic Senzor
Fluxul optic senzor este utilizat pentru a îmbunătăți poziția ține precizie de arducopter.Acest senzor este susținută de Arducopter 2.6 și mai sus.
Conectarea optic senzor de debit pentru a APMv2
Putere, GND, NCS ace ar trebui să fie atașat la A3
MISO, MOSI si SCLK ace ar trebui să fie sudat direct la pinii prezentate mai sus
Default montare obiectiv este îndreptat în jos, ace înainte
O idee bună pentru a fixa firele cu unele legături de cablu astfel încât acestea nu se rup de-a lungul timpului
Cum să vă conectați la fluxul optic senzor la ardupilot mega bord.Asigurați-vă că pinii sunt cu care se confruntă înainte
Acum, că totul a fost conectat totul următorul lucru pe care să faceți este să configurați arducopter firmware-ului pentru rama.
Etichete: motor fără perii, apm 2.6, cadru de drone de mare, kit quadrocopter, zbor drone controller arduino gps, kit drone apm, universal diy componente kit, f4 quadrocopter kit, apm telemetrie, motor rc.
Fisa tehnica
| Instrument De Consumabile | Chit clasa |
| Pentru Un Tip De Vehicul | Elicoptere |
| Upgrade Componente/Accesorii | Cadru |
| 521 | 366212 |
| Patru-wheel-Drive Atribute | Montaj |
| RC Piese si Acc | Componente Auto |
| Nume De Brand | jmt |
| Material | Metal |
| Control De La Distanță Periferice/Dispozitive | Controler De La Distanță |
Recenzii
Produse similare:
-

4BUC Modernizate Aluminiu butoi Umplut Amortizor Amortizor pentru HBX 16889 1/16 RC Piese Auto M16100A
70.78lei53.09lei53.09lei
-

JDHMBD Model de Avion de Control de la Distanță Elicopter 450 Motor Motor fără Perii 3800KV-2222-3.2/3.5
101.70lei86.44lei86.44lei
-

Original Radiolink Receptor R6DS R6DSM R8EF R8FM R9DS R12DS R12DSM R4F R4FG R7FG byme O D controler de zbor
27.99lei27.13lei27.13lei
-

LDARC KINGKONG XT1806 2500KV Motor fără Perii CW CCW pentru FPV Racing Drona Quadcopter RC Racer Accesoriu
39.13lei35.59lei35.59lei
-

1Set Spate Exterior Portal Carcasa Capac Metalic pentru 1/10 Redcat Gen8 Scout II Crawler Y4QA
55.00lei39.05lei39.05lei
-

1:12 4WD Camion Deșert Părți ale Axului de Transmisie a Arborelui de Antrenare Pentru FY03 JJRC Î39
52.68lei32.67lei32.67lei













© 2024 www.primaria-urzicuta.ro




